KITTI数据集是世界范围内影响力最广的自动驾驶数据集之一,由四个光学摄像头数据集、一个Velodyne 64线3D激光雷达数据集和标定文件等组成。
其中图像文件以png格式储存,点云数据以bin格式储存。
利用ROS系统下的RViz工具来进行图像和点云的同步可视化。
主要步骤如下:
创建一个catkin程序包
cd ~/catkin_ws/src #切换到ros工作空间 catkin_create_pkg kitti_tutorial rospy #创建新的package cd .. catkin_make读取数据并进行发布
重新整理一下ros发布话题的步骤吧
①首先初始化一个ros节点,这是ros通信的基础
②创建发布者,用于读取数据并将其以ros消息的形式发布出去
③设置发布速率
④发布消息
这里我分别创建了data_utils.py和publish_utils.py工具包以简化主程序run.py
将三个文件放在kitti_tutorial/src目录下"""data_utils.py,用于协助读入图像和点云数据""" import cv2 import numpy as np def read_camera(path): return cv2.imread(path) def read_point_cloud(path): return np.fromfile(path, dtype = np.float32).reshape(-1, 4)"""publish_utils.py,用于协助ros进行消息的发布""" import rospy from visualization_msgs.msg import Marker from geometry_msgs.msg import Point from sensor_msgs.msg import Image, PointCloud2 from cv_bridge import CvBridge from std_msgs.msg import Header import sensor_msgs.point_cloud2 as pcl2 FRAME_ID = 'map' #坐标系名称 def publish_camera(cam_publisher, bridge, image): cam_publisher.publish(bridge.cv2_to_imgmsg(image, 'bgr8')) #用于把opencv读入的图片转化为ros可以读取的格式 def publish_point_cloud(pc_publisher, point_cloud): header = Header() header.stamp = rospy.Time.now() header.frame_id = FRAME_ID #锚定坐标轴 pc_publisher.publish(pcl2.create_cloud_xyz32(header, point_cloud[:,:3])) #这里只发布了点云的xyz坐标 def publish_ego_car(ego_car_publisher): '''在点云坐标系下发布45度的摄像机视野线''' marker = Marker() marker.header.frame_id = FRAME_ID marker.header.stamp = rospy.Time.now() marker.id = 0 #标志的唯一ID marker.action = Marker.ADD marker.lifetime = rospy.Duration() #生命周期 marker.type = Marker.LINE_STRIP marker.color.r = 0.0 marker.color.g = 1.0 marker.color.b = 0.0 marker.color.a = 1.0 #透明度 marker.scale.x = 0.2 #线条宽度 marker.points = [] marker.points.append(Point(10, -10, 0)) marker.points.append(Point(0, 0, 0)) marker.points.append(Point(10, 10, 0)) ego_car_publisher.publish(marker)"""run.py,用于最终执行""" #!/usr/bin/env python #Shebang魔法指令 import os import rospy from cv_bridge import CvBridge from visualization_msgs.msg import Marker from sensor_msgs.msg import Image, PointCloud2 from data_utils import read_camera, read_point_cloud from publish_utils import publish_camera, publish_point_cloud, publish_ego_car DATA_PATH = '/home/zhangyuqin/Projects/KITTI/RowData/2011_09_26_drive_0070_sync/' if __name__ == '__main__': rospy.init_node('kitti_node', anonymous = True) #初始化节点 cam_publisher = rospy.Publisher('kitti_cam_publisher', Image, queue_size = 10) #创建摄像头publiser pc_publisher = rospy.Publisher('kitti_pc_publisher', PointCloud2, queue_size = 10) #创建激光雷达publiser ego_publisher = rospy.Publisher('kitti_ego_car', Marker, queue_size = 10) #创建车辆模型publisher bridge = CvBridge() rate = rospy.Rate(5) frame = 0 #标记初始化帧数 while not rospy.is_shutdown(): img = read_camera(os.path.join(DATA_PATH, 'image_02/data/%010d.png'%frame)) #读入图片消息数据。格式化输出,%010d表示10位整数 pc = read_point_cloud(os.path.join(DATA_PATH, 'velodyne_points/data/%010d.bin'%frame)) #读入点云消息数据 publish_camera(cam_publisher, bridge, img) #发布 publish_point_cloud(pc_publisher, pc) publish_ego_car(ego_publisher) rospy.loginfo("camera image published") rate.sleep() frame += 1 frame %= 420 #这个数据集一共420帧,其实可以多写几行来自动读取帧数,懒了编写好以上三个源文件后,还需要赋予run.py可执行权限,rosrun运行我们创建的节点
roscd kitti_tutorial/src #roscd一步到位,切换到ros工作空间 chmod +x run.py #赋予文件可执行权限 rosrun kitti_tutorial run.py启动图形化模拟环境rviz,接受消息并可视化
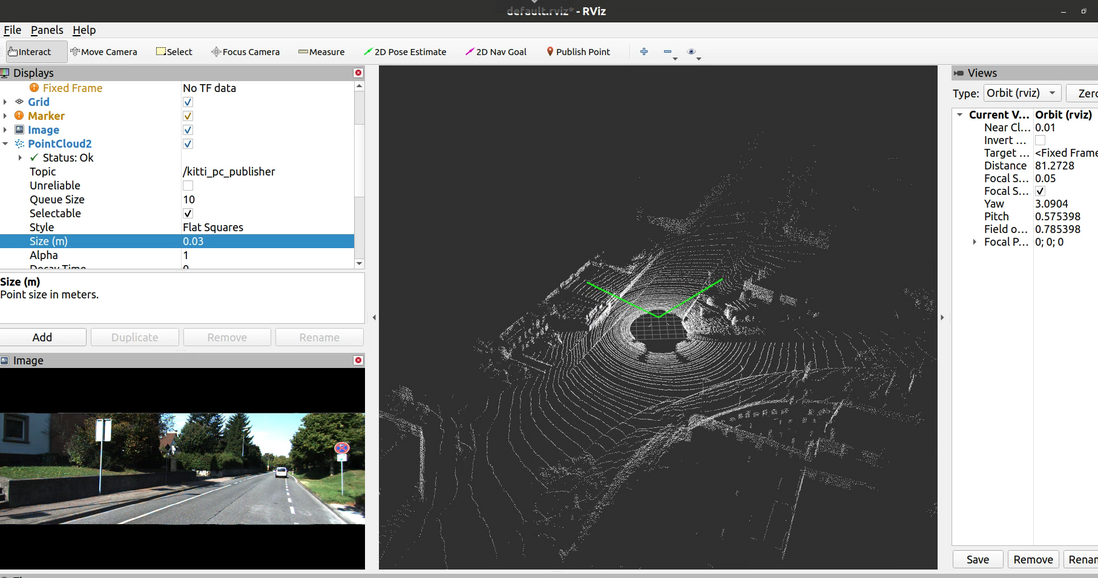
打开rviz可视化工具rviz打开后是空界面,点左下角add,可以看到我们刚刚发布的话题,从中选择我们需要的消息并读入
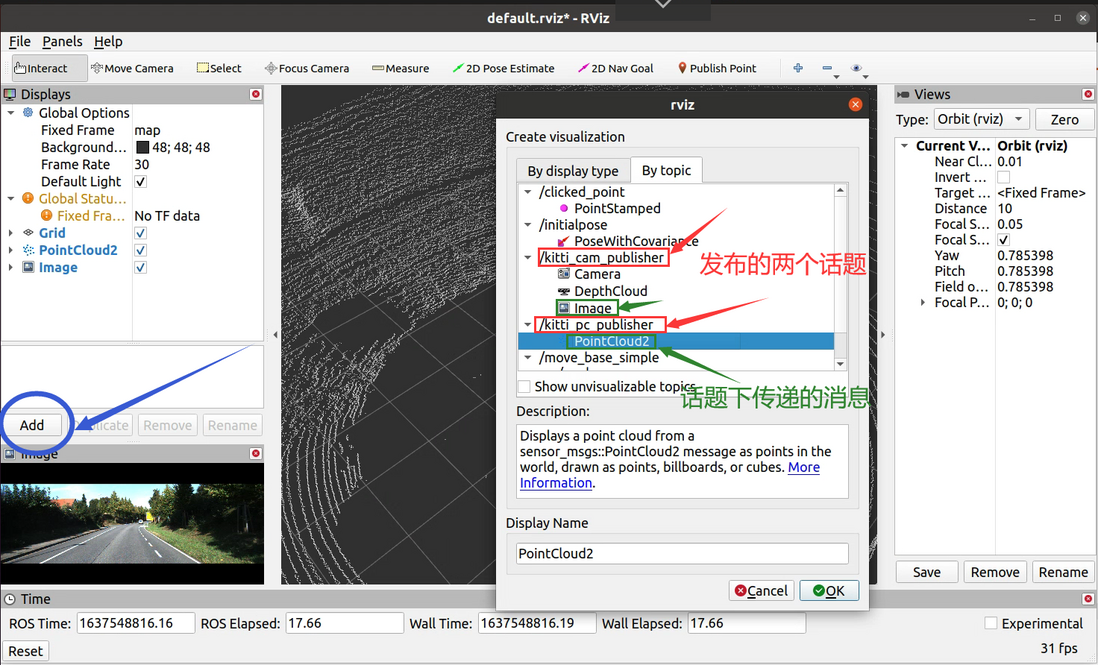
可视化完成