https://vjudge.net/problem/UVA-1601
题目
你在游乐场的鬼屋里当操作员,专门控制鬼屋里的机器人……某日没事干的出题人把这些机器人搬到了其他地方,你需要在最短的时间内遥控机器人让他们回到原位。所有机器人都可以同时在1秒内朝四个方向(上下左右)移动1格,但是每次移动都必须符合以下条件
- 每个格子只能有一个机器人
- 任意两个机器人的位置不能交换
- 不能移动到墙里……
问你需要至少多少时间才能把所有机器人归位。
输入包含多组数据
地图的宽、高和机器人的数量
下面几行表示地图,其中小写字母表示机器人的位置,大写字母表示机器人的终点,'#'表示墙,' '表示可以走的位置……
输出每组数据下的最短时间
样例输入
5 5 2
#####
#A#B#
# #
#b#a#
#####
16 4 3
################
## ########## ##
# ABCcba #
################
16 16 3
################
### ## # ##
## # ## # c#
# ## ########b#
# ## # # # #
# # ## # # ##
## a# # # # #
### ## #### ## #
## # # # #
# ##### # ## ##
#### #B# # #
## C# # ###
# # # ####### #
# ###### A## #
# # ##
################
0 0 0
样例输出
7
36
77
题解
只用了一个单向bfs,对空格编号建图,用前向星……
检测能否互换需要分n=2和n=3两种情况考虑
n=2时很简单
n=3时要考虑$\binom{3}{2}$种情况,头晕还多想了3个位置都换了的情况,其实这是不可能的,由于只能移动一步,所以加上这个这只是浪费时间……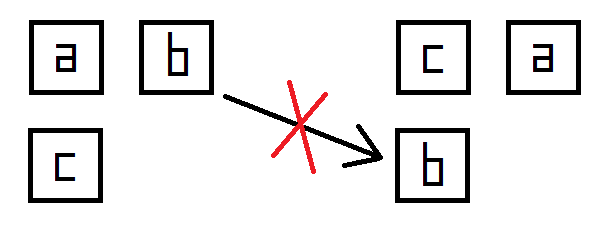
AC代码(1080ms,去掉浪费时间的部分是750ms)
#include<bits/stdc++.h>
using namespace std;
#define REP(i,x,y) for(register int i=(x); i<(y); i++)
#define REPE(i,x,y) for(register int i=(x); i<=(y); i++)
#ifdef sahdsg
#define DBG(a,...) printf(a, ##__VA_ARGS__)
#else
#define DBG(a,...) (void)0
#endif
#define MAXN 20
#define MAXP 300
int w,h,n;
int cnt;
int mp[MAXN][MAXN];
int st[3],ed[3];
bool vis[MAXP][MAXP][MAXP];
int hed[131072], nxt[131072], poi[131072], fstar=0;
inline void conn(int f, int t) {
nxt[fstar]=hed[f];
poi[fstar]=t;
hed[f]=fstar++;
}
struct node {
int s;
int p[3];
node(int *x, int y=0):s(y) {memcpy(p,x,sizeof p);}
};
inline void bfs() {
memset(vis,0,sizeof vis);
queue<node> q;
q.push(node(st));
int ans=-1;
while(!q.empty()) {
node now = q.front();q.pop();
if(memcmp(now.p,ed,sizeof ed)==0) {ans=now.s; break;}
int i[3],k[3],dis[3];
REP(i,0,n) dis[i]=now.p[i];
memset(k,0,sizeof k);
#define CHK k[0]!=k[1] && k[1]!=k[2] && k[2]!=k[0]
for(i[0]=hed[now.p[0]]; ~i[0]; i[0]=nxt[i[0]]) {
k[0]=poi[i[0]];
if(n>=2) for(i[1]=hed[now.p[1]]; ~i[1]; i[1]=nxt[i[1]]) {
k[1]=poi[i[1]];
if(n>=3) for(i[2]=hed[now.p[2]]; ~i[2]; i[2]=nxt[i[2]]){
k[2]=poi[i[2]];
if(!vis[k[0]][k[1]][k[2]]) if(CHK) {
if(dis[0]==k[1] && dis[1]==k[0]) continue;
if(dis[0]==k[2] && dis[2]==k[0]) continue;
if(dis[1]==k[2] && dis[2]==k[1]) continue;
int j[3],l[3];
memcpy(j,k,sizeof j);memcpy(l,dis,sizeof j);
sort(j,j+3);sort(l,l+3);
if(memcmp(j,l,sizeof j)==0) continue;
vis[k[0]][k[1]][k[2]]=1;
q.push(node(k,now.s+1));
}
}
else if(!vis[k[0]][k[1]][0]) if(k[0]!=k[1]) {
if(k[0]==dis[1] && k[1]==dis[0]) continue;
vis[k[0]][k[1]][0]=1; q.push(node(k,now.s+1));
}
} else if(!vis[k[0]][0][0]){vis[k[0]][0][0]=1; q.push(node(k,now.s+1));}
}
}
printf("%d\n", ans);
}
int main() {
#ifdef sahdsg
freopen("in.txt", "r", stdin);
#endif
while(~scanf("%d%d%d", &w, &h, &n) && w) {
cnt=0;
memset(hed,-1,sizeof hed);
memset(st,0,sizeof st);
memset(ed,0,sizeof ed);
fstar=0;
REP(i,0,h) REP(j,0,w) {
char ch = getchar();
if(ch<' ')ch=getchar();
if(ch=='#') {mp[i][j]=-1; continue;}
mp[i][j]=cnt;
if(ch>='a' && ch<='z') st[ch-'a']=cnt;
else if(ch>='A' && ch<='Z') ed[ch-'A']=cnt;
conn(cnt,cnt);
if(i>0 && mp[i-1][j]>=0) conn(mp[i-1][j],cnt),conn(cnt,mp[i-1][j]);
if(j>0 && mp[i][j-1]>=0) conn(mp[i][j-1],cnt),conn(cnt,mp[i][j-1]);
cnt++;
}
bfs();
}
return 0;
}
比较慢,可以用双向bfs或A*优化……