ROS-学习笔记-01
ROS (Robot Operating System, 机器人操作系统) 提供一系列程序库和工具以帮助软件开发者创建机器人应用软件。它提供了硬件抽象、设备驱动、库函数、可视化、消息传递和软件包管理等诸多功能。ROS遵守BSD开源许可协议。
本文内容为安装ROS Noetic并测试简单小乌龟仿真机器人的例子。太长不读的话,记得安装ubuntu20后,换源,添加hosts,然后不要勾选安全更新以外的任何更新,保持低版本。最后用sudo apt安装catkin,再按照ROS官方教程手动安装ROS Noetic即可。
目录
ROS-学习笔记-01
安装
测试
安装
1、脚本下载方式
我安装了最新的Ubuntu20.04,所以使用脚本下载:
Single-line installation The following line of command will install the latest ROS Noetic Ninjemys on Ubuntu Focal 20.04.
wget -c [https://raw.githubusercontent.com/qboticslabs/ros_install_noetic/master/ros_install_noetic.sh](https://raw.githubusercontent.com/qboticslabs/ros_install_noetic/master/ros_install_noetic.sh) && chmod +x ./ros_install_noetic.sh && ./ros_install_noetic.sh
2、手动下载方式
脚本下载速度很慢可以切换手动下载,更换为国内的源,以下三选一即可:http://wiki.ros.org/ROS/Installation/UbuntuMirrors
中科大: (不推荐)
sudo sh -c '. /etc/lsb-release && echo "deb [http://mirrors.ustc.edu.cn/ros/ubuntu/](http://mirrors.ustc.edu.cn/ros/ubuntu/) `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'
清华: (推荐)
sudo sh -c '. /etc/lsb-release && echo "deb [http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/](http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/) `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'
北外:
sudo sh -c '. /etc/lsb-release && echo "deb [http://mirrors.bfsu.edu.cn/ros/ubuntu/](http://mirrors.bfsu.edu.cn/ros/ubuntu/) `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'
输入上述任意源以后,再按照官方教程继续下载
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C65
sudo apt update
sudo apt install ros-noetic-desktop-full
如果是其他Linux版本:
ROS Melodic Morenia 发行版可以安装在 Ubuntu Artful (17.10),Bionic (18.04 LTS),Debian Stretch 和其他一些平台上。 ROS Kinetic Kame的 在Ubuntu Wily(15.10)和Ubuntu Xenial (16.04 LTS)可用。
wiki.ros.org上还可以查询OS X和Debian的安装方式。
下载出现的问题::
下列软件包有未满足的依赖关系:
ros-noetic-desktop-full : 依赖: ros-noetic-desktop 但是它将不会被安装
依赖: ros-noetic-perception 但是它将不会被安装
依赖: ros-noetic-simulators 但是它将不会被安装
依赖: ros-noetic-urdf-sim-tutorial 但是它将不会被安装
E: 无法修正错误,因为您要求某些软件包保持现状,就是它们破坏了软件包间的依赖关系。
即使再卸载重装也没用,所以用aptitude修复:
sudo apt-get install aptitude
sudo aptitude install ros-noetic-desktop-full
按照提示运行,这样就可以解决大部分依赖冲突,然后根据提示中的冲突进行版本修正,aptitude会提供几种修正的方式。
然而,在修正的过程中我涉及了底层库,导致gdm3,ubuntu-desktop和字体都被卸载,十分尴尬。
ros-noetic-perception-pcl 所依赖的pcl相关包很容易解决。ros-noetic-desktop也很容易安装上。
但是剩下的:ros-noetic-perception、ros-noetic-simulator等包就涉及到: libgtk-3-dev、libglib2.0-0:i386 等依赖的问题,如果按照aptitude的第二套或者第三套方案走,很快桌面、shell、字体这些东西就会全部消失……
不知道为何其他人安装时就没有这个问题,导致我重装ubuntu20.04好几次,最终才装好。
踩坑记录见我的另一篇博客整理吧,这篇博客中通过重装系统,并减少系统更新完成了修复:
查看可以安装的ROS库
命令行输入:apt-cache search ros-noetic 。如果是其他版本ROS,替换noetic为kinetic或者melodic就行。
测试
环境设置和遇到的问题:
$ export | grep ROS
echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrc
source ~/.bashrc
设置好以后,测试一下,先设置rosdep init,但是会报错,所以下载了python3-rosdep,然后更换hosts文件。
sudo apt install python3-rosdep
sudo gedit /etc/hosts
可以添加下面1行,也可以更换掉整个hosts文件,见这里下载hosts:
199.232.28.133 raw.githubusercontent.com
然后更新。
sudo rosdep init
sudo rosdep update
更新成功,但是要在终端运行安装roslauch才能运行roscore(运行这个会卸载掉python3-rosdep,也不知道为啥):
sudo apt install ros-noetic-roslaunch
roscore
roscore成功,但rosrun始终无法启动,而且无法安装对应依赖rosbash,而且依赖catkin库。
解决办法:
出现这种问题后,我又用aptitude安装catkin,版本回退,再重新安装ROS。这次使用aptitude没有太严重的问题,只是重装ROS的流程比较长。
安装catkin参考:https://www.pianshen.com/article/2265919347/
是否接受该解决方案?[Y/n/q/?] n
下列动作将解决这些依赖关系:
记得这个时候选n,然后选第二次或者第三次的解决方案,处理好之后会卸载ROS,然后运行:sudo apt install catkin
最后sudo apt install ros-noetic-desktop-full就完成了。
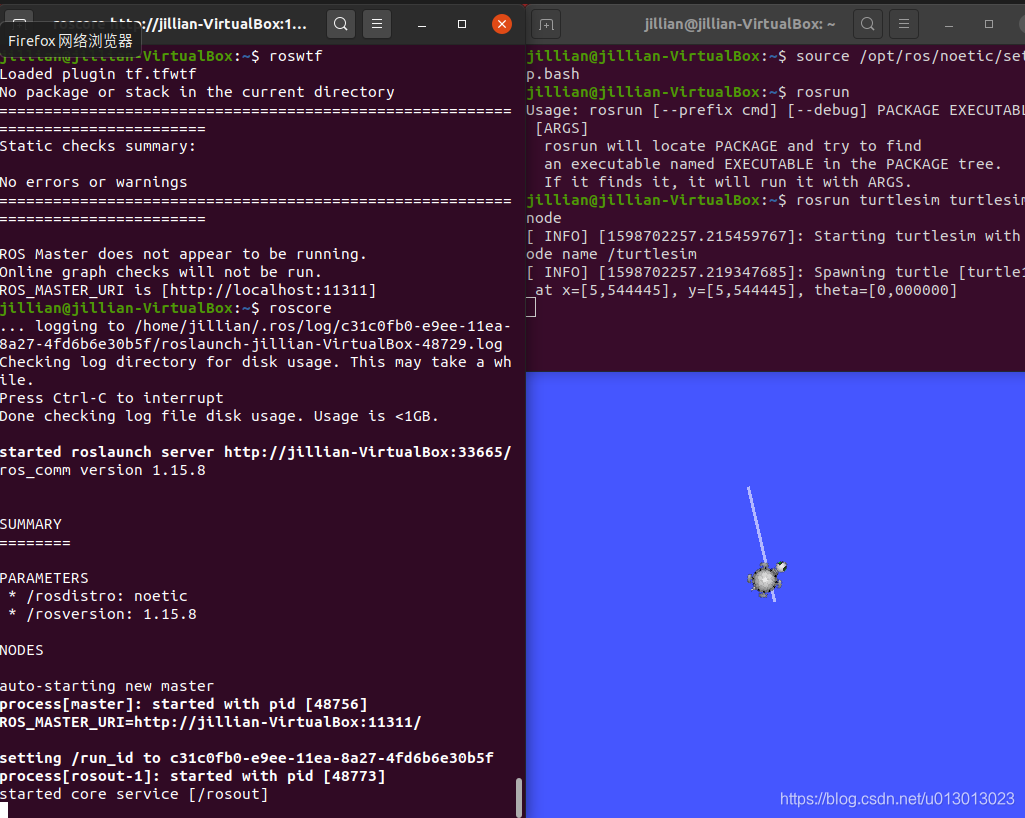
接下来测试,同样要运行source脚本,然后打开三个终端分别运行以下三行即可:
roscore
rosrun turtlesim turtlesim_node
rosrun turtlesim turtle_teleop_key
第三个终端是用方向键控制小乌龟,效果图如下:
 标题
标题
大部分网络上的Neotic安装博文都是照着官方教程来一遍,偶尔会遇到一些库冲突,使用aptitude解决就行了。
但是aptitude不是万能的啊,最终还是要靠自己动手测试才行。