推荐
专栏
教程
课程
飞鹅
本次共找到6057条
背包问题动态规划
相关的信息
Kubrnete
•
4年前
动态规划之马拉车算法
问题描述:给定一个字符串,你的任务是计算这个字符串中有多少个回文子串。具有不同开始位置或结束位置的子串,即使是由相同的字符组成,也会被视作不同的子串。如"abc"有三个回文子串‘a','b','c'.示例1:输入:"abc"输出:3解释:三个回文子串:"a","b","c"示例2:输入:"aaa"输出
Wesley13
•
4年前
Unity3D学习笔记(二十六):MVC框架下的背包系统(1)
MVC背包!(https://oscimg.oschina.net/oscnet/dd09a8a61054c24d33e9fd2e8c3850eab02.png)需求:1、背包格子的装备是可以拖动的2、装备栏的装备也是可以拖动的3、当背包格子的装备拖动到装备栏时,如果是装备类型和装备栏类型是一致的能装上4、背包的装备是按照顺序放在
Wesley13
•
4年前
411,动态规划和递归求不同路径 II
!(https://oscimg.oschina.net/oscnet/ab5b3584e82b33b11b46a2c4672f398dd49.png)Ifyou'renotsatisfiedwiththelifeyou'reliving,don'tjustcomplain.Dosomethingaboutit.
Wesley13
•
4年前
2020深圳杯数学建模C题
2020深圳杯C题(已更新)之前发过一篇文章,因为转手比较多,现在已经更新文章部分内容无线可充电传感器网络充电路线规划无线传感网络中的充电器需要定期充电,一个好的充电路线规划对维持无线传感网络正常工作有着重要意义。本文建立了基于经典TSP问题的动态规划模型,采用蚁群算法和多目标规划对模型
深度学习
•
5个月前
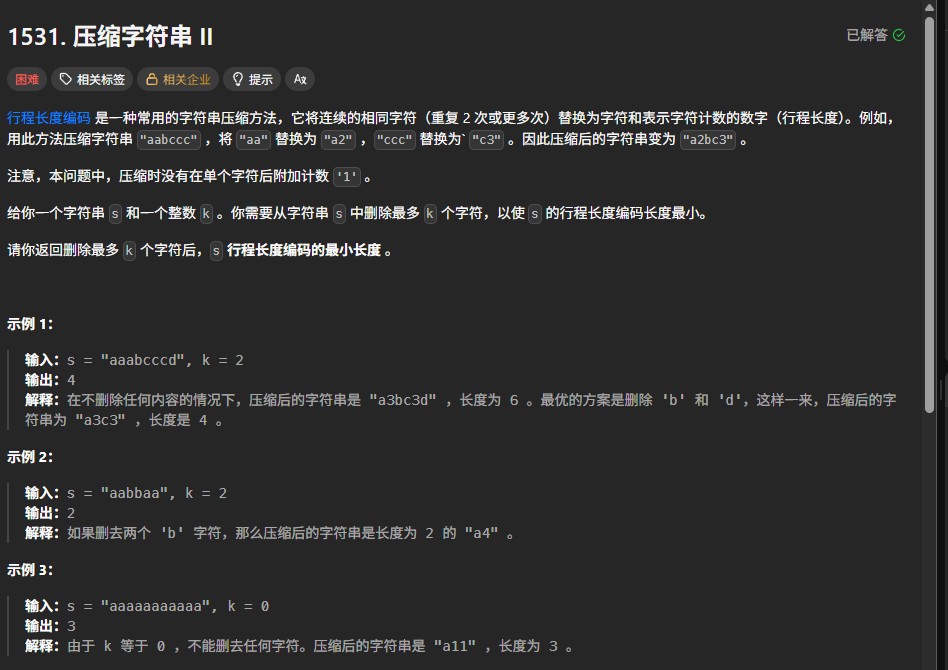
动态规划巧解字符串压缩优化问题 - 力扣1531题深度解析
一、问题理解行程长度编码(RunLengthEncoding)是一种简单有效的压缩方法。题目要求我们在删除最多k个字符后,使压缩后的字符串长度最短。二、解题思路1.状态定义:dp:情况1:删除当前字符,直接继承dp1.练习简单DP问题1.逐步过渡到这类复杂
深度学习
•
5个月前
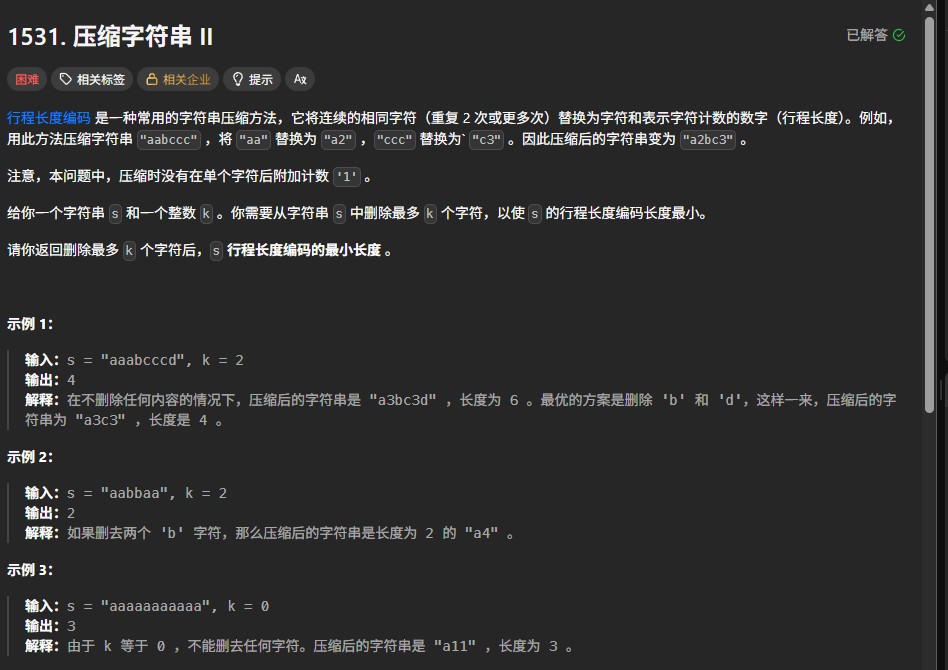
动态规划巧解字符串压缩优化问题 - 力扣1531题深度解析
一、问题理解行程长度编码(RunLengthEncoding)是一种简单有效的压缩方法。题目要求我们在删除最多k个字符后,使压缩后的字符串长度最短。二、解题思路1.状态定义:dp:情况1:删除当前字符,直接继承dp1.练习简单DP问题1.逐步过渡到这类复杂
深度学习
•
5个月前
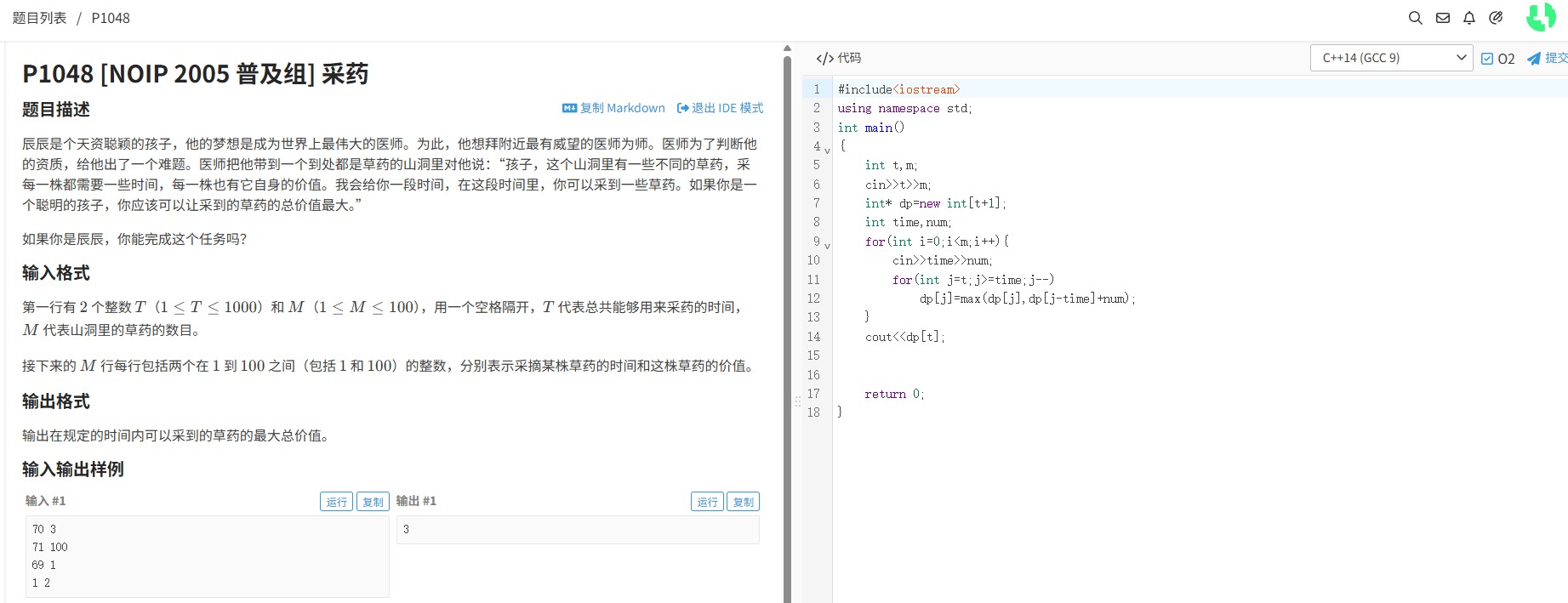
NOIP 2005 普及组 洛谷1048题 解题思路和步骤 C++实现带注释
一、解题思路:问题分析:给定背包容量T和M个物品(草药),每个物品有采摘时间t:若当前物品时间超过剩余时间:dp:使用滚动将空间复杂度从O(NV)降为O(V),需逆序遍历时间。二、代码实现:Cincludeusingnamespacestd;i
京东云开发者
•
1年前
系统技术规划的几点概要思路
每年年底或年初都会有各种总结规划,业务部门有业务的规划,研发部门有研发的技术规划,下面分享一下对系统技术规划的几点思路。研发技术规划重点对所负责系统的技术架构升级、技术债问题以及运维问题进行梳理并根据梳理的问题制定匹配的方案,据此方案提前进行技术储备和资源
贾蔷
•
5个月前
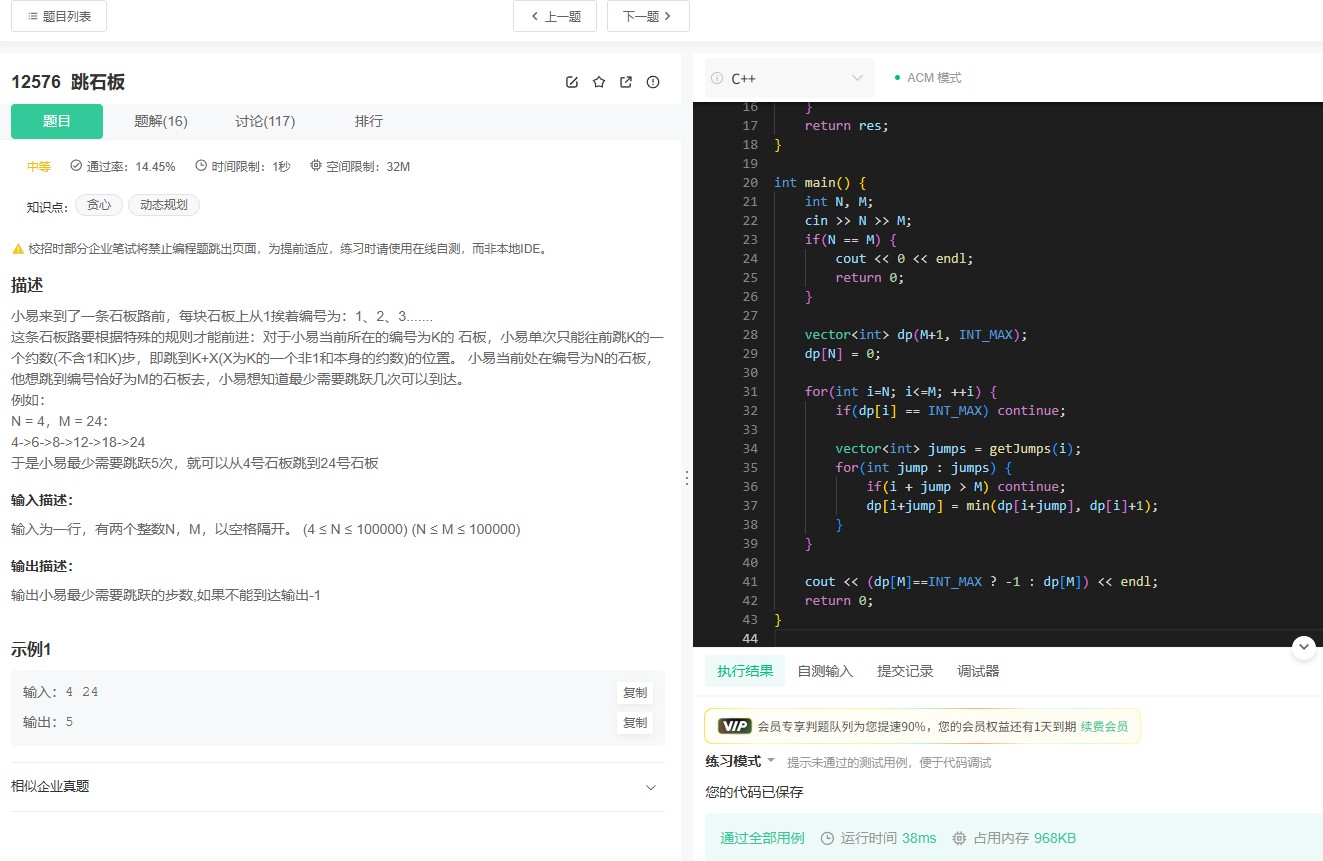
牛客12576题全解析:动态规划+质因数分解解决跳跃问题
一、题目解读牛客12576题是一道经典的算法题,要求给定起点N和终点M,求解从N到M的最少跳跃次数。题目考察的核心在于路径优化与动态规划思想,需结合数论中的质因数分解技巧,通过合理设计算法降低时间复杂度,避免暴力枚举的指数级耗时。二、解题思路采用“动态规划
贾蔷
•
5个月前
2023年GESP六级题解:洛谷P10108闯关游戏动态规划解法详解
一、题目解读本文针对2023年GESP六级题目“闯关游戏”(洛谷P10108)进行详细解析。题目要求玩家通过不同关卡路径选择,计算从起点到终点的最大得分。关卡间存在跳跃规则,需结合动态规划思想设计高效算法,最终输出最优得分。二、解题思路采用动态规划(Dyn
1
2
3
•••
606